농촌진흥청이 농업 현장의 안전을 강화하고 작업 효율을 높이는 미래 농업환경 조성을 위해 ‘농작업 근력보조 착용 로봇’ 기술 개발에 박차를 가하고 있다.
현재 우리 농촌은 농업인구 감소 및 고령화로 인해 농업 노동력 부족이 심화되고 있는 가운데 농업인의 작업 부담을 덜어줄 기술적 대안이 절실한 상황이다. 특히 농업인 업무상 질병 중 근골격계 질환이 92.9%라는 압도적인 비중을 차지하고 있어, 이를 사전에 방지할 예방책 마련이 시급하다.
이에 농진청은 지난해 9월 현대자동차·기아와 ‘착용 로봇 기반 농업발전 및 사회적 가치 창출을 위한 업무협약’을 체결하는 등 민관협력을 통한 기술 개발에 나섰다. 특히 현대차·기아 로보틱스랩이 개발한 무동력 어깨 근력 보조 로봇 ‘엑스블 숄더(X-ble Shoulder)’를 농업 현장에 적용해 실효성을 검증 중이다. 지난해 두 차례에 걸친 실증 테스트 결과, 작업자의 어깨 부담은 줄어든 반면 작업 효율성은 크게 향상된 것으로 확인됐다.
이러한 착용 로봇 기술의 도입은 농업인의 건강 증진은 물론 상당한 경제적 파급효과를 불러올 것으로 전망된다. 우선 농업인의 근력 부담을 약 30% 경감함으로써 연간 약 162억 원의 의료 비용을 절감할 수 있을 것으로 보인다. 이는 연간 근골격계 질환자 10만 8,000명이 인당 50만 원의 치료비를 지출한다고 가정했을 때, 30%의 예방 효과로 도달 가능한 수치다.
산업적 측면에서의 성장 가능성도 주목된다. 로봇 제작 및 판매 시장의 활성화를 통해 연간 50~100억 원 규모의 신규 매출이 발생할 것으로 관측된다. 이는 향후 농업용 보조 장비 시장을 선점하고, 국내외 농업 자동화 시장으로 진출할 수 있는 기반이 될 수 있다.
현장의 가시적인 변화도 예측된다. 기술 보급이 본격화되면 10만 명을 상회하던 근골격계 질환자가 3만 2,400명 수준으로 대폭 감소해 농업인의 삶의 질이 개선될 것으로 전망된다. 아울러 장비 생산과 기술 지원 등 관련 산업 확장에 따라 100명 이상의 신규 일자리 창출 효과도 거둘 수 있을 것으로 보인다.
농진청 국립농업과학원은 이번 ‘농작업 근력보조 착용 로봇’ 적용을 통해 어깨 부담 감소의 정량화된 수치를 산출하고, 실제 작업 효율성 향상이라는 유의미한 성과를 도출했다.
이번 연구를 주도한 서민태 농진청 국립농업과학원 농촌환경안전과 연구사는 “주요 작목의 ‘위보기(상부) 작업’에 착용 로봇을 적용한 결과, 어깨 근육 사용량이 획기적으로 줄어들어 농업인의 신체적 부담 경감과 직업성 질환 예방 효과가 입증됐다”고 강조했다.
이어 서 연구사는 “고령화와 인력 부족으로 어려움을 겪는 농촌 현장에서 이번 기술이 작업 효율성을 극대화하고 생산성을 높이는 데 핵심적인 역할을 할 것으로 전망된다”고 밝혔다.
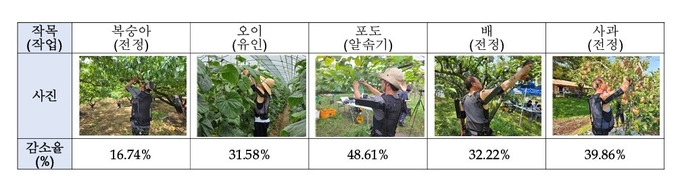
<주요 5개 작목 작업시 근육 사용량 감소율>
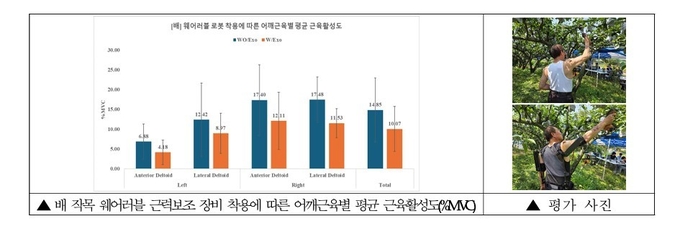
<배 전정 작업시 근력보조 착용 로봇 적용에 따른 근육활성도>
특히 농업 현장에서 어깨 사용이 잦은 주요 5개 작목(복숭아·배·사과 전정, 오이 유인, 포도 알솎기)을 대상으로 적용 평가를 실시한 결과, 로봇 착용 시 어깨 근육 사용량이 평균 33.37% 감소하는 것으로 나타났다.
구체적인 데이터 분석에 따르면, 로봇을 착용하지 않은 상태에서 위보기(상부) 작업을 수행할 때 농업인의 평균 근육 활성도는 11.40%MVC로 측정됐다. 반면, 근력보조 착용 로봇을 적용했을 때는 7.60%MVC까지 떨어지며 확연한 차이를 보였다. 이는 로봇 기술이 농업인의 어깨 부담을 낮추는 데 실질적인 기여를 하고 있음을 수치로 입증한 결과다.
적용 대상인 5개 작목 중 어깨 근육 사용량 감소 효과가 가장 두드러진 분야는 포도 알솎기 작업으로 48.61%의 감소율을 기록했다. 이어 사과 전정(39.86%), 배 전정(32.22%), 오이 유인(31.58%) 순으로 높은 보조 효과가 나타났으며, 복숭아 전정(16.74%) 또한 유의미한 수치를 보였다.
배 전정 작업에서의 평가 결과를 보면 향후 기술 보급의 기대감을 높이고 있다. 배 농업인이 별도의 장비 착용 없이 작업을 수행할 때 어깨 근육 활성도는 평균 14.85%MVC에 달했으나, 착용 로봇을 적용하자 10.07%MVC로 급감했다. 이는 기존 방식 대비 어깨 하중이 32.22%나 경감된 것으로, 통계적으로도 매우 유의미한 차이(p<.001)를 입증한 결과다. 세부 근육별로 살펴보면 어깨 전반에서 고른 하중 분산 효과가 확인됐다. △좌측 전방 삼각근(39.23% 감소) △우측 측방 삼각근(34.06% 감소) △우측 전방 삼각근(30.38% 감소) 순으로 높은 경감률을 보였으며, 좌측 측방 삼각근(27.78% 감소)을 포함한 대부분의 어깨 근육군에서 로봇의 실질적인 보조 성능이 확인됐다.